
 por
por
Los ingenieros del MIT han desarrollado un sistema telerrobótico para ayudar a los cirujanos a tratar a los pacientes con aneurismas y accidentes cerebrovasculares de forma rápida y remota. Con un joystick modificado, los cirujanos de un hospital pueden controlar un brazo robótico en otro lugar para operar de forma segura a un paciente durante un período de tiempo crítico que podría salvar la vida del paciente y preservar la función cerebral.
El sistema robótico, cuyo movimiento está controlado por imanes, está diseñado para ayudar de forma remota en la intervención endovascular, un procedimiento realizado en situaciones de emergencia para tratar accidentes cerebrovasculares causados por un coágulo de sangre. Dichos procedimientos normalmente requieren que un cirujano guíe manualmente un alambre delgado hasta el coágulo, donde pueden eliminar físicamente el bloqueo o administrar medicamentos para romperlo.
La accesibilidad es una de las limitaciones de estos procedimientos: los cirujanos neurovasculares a menudo se encuentran en grandes instalaciones médicas a las que los pacientes tienen difícil acceso en áreas remotas, especialmente durante la «hora dorada», el período crítico después del inicio de un accidente cerebrovascular, durante el cual se debe dar tratamiento. para minimizar cualquier daño cerebral.
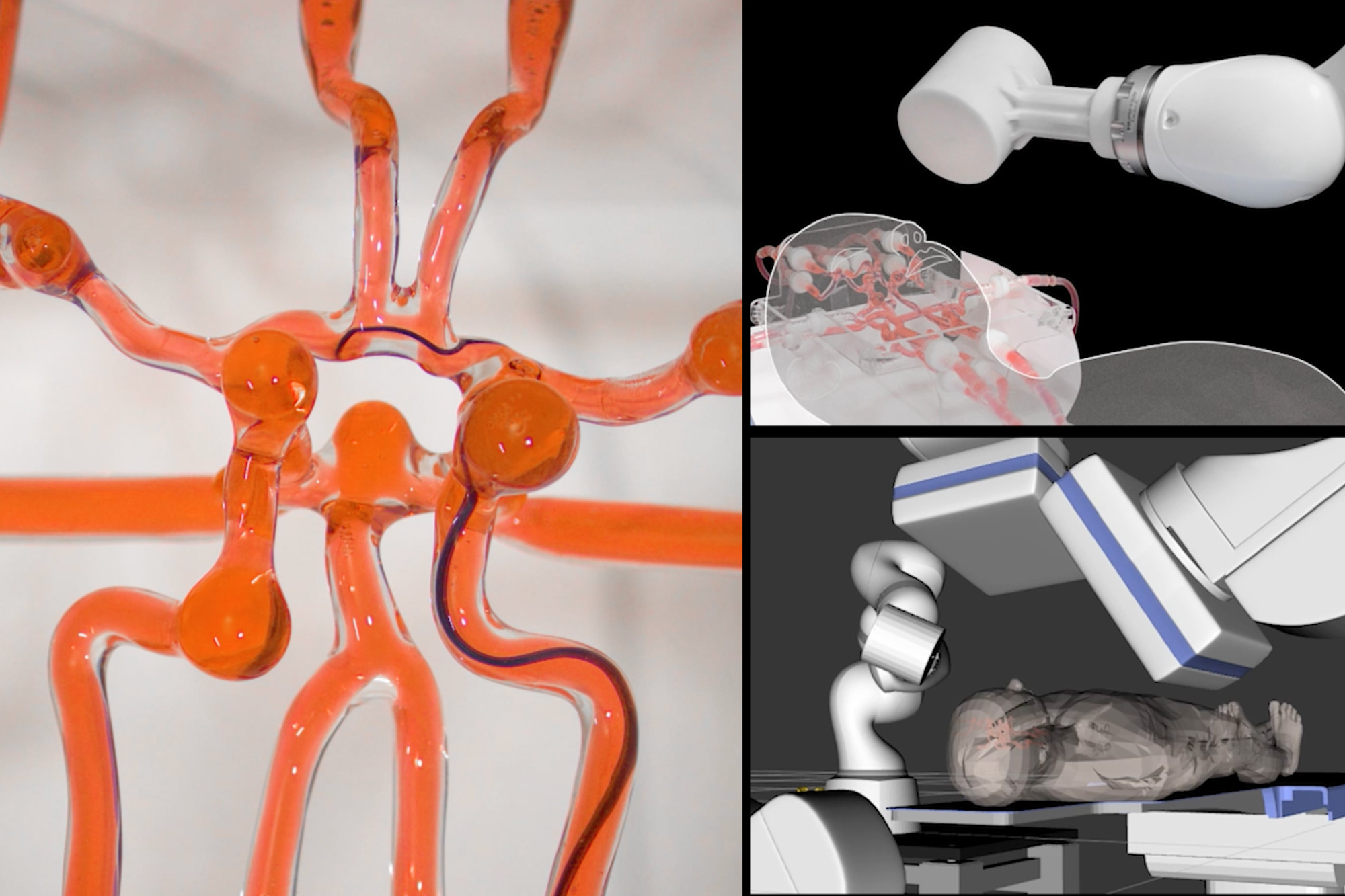
El equipo del MIT prevé que su sistema robótico podría instalarse en hospitales más pequeños y ser guiado de forma remota por cirujanos capacitados en centros médicos más grandes. El sistema incluye un brazo robótico de grado médico con un imán adherido a su muñeca. Con un joystick e imágenes en vivo, un operador puede ajustar la orientación del imán y manipular el brazo para guiar un cable magnético delgado y suave a través de arterias y vasos.
Los investigadores demostraron el sistema en un «fantasma», un modelo transparente con vasos que imitan arterias complejas en el cerebro. Con solo una hora de entrenamiento, los neurocirujanos pudieron controlar de forma remota el brazo robótico para guiar un cable a través de un laberinto de vasos para llegar a las ubicaciones objetivo en el modelo.
“Imaginamos, en lugar de transportar a un paciente de un área rural a una gran ciudad, que podría ir a un hospital local donde las enfermeras podrían instalar este sistema. Un neurocirujano en un importante centro médico podría observar las imágenes en vivo del paciente y usar el robot para operar durante esa hora dorada. Este es nuestro sueño futuro”, dice Xuanhe Zhao, profesor de ingeniería mecánica e ingeniería civil y ambiental en el MIT.
Zhao y su equipo publicaron sus hallazgos hoy en Robótica científica. Los coautores del MIT incluyen al autor principal Yoonho Kim, Emily Genevriere y Jaehun Choe, así como a Pablo Harker, Robert Regenhardt, Justin Vranic, Adam Dmytriw y Aman Patel del Hospital General de Massachusetts (MGH) y Marcin Balicki de Philips Research North America. .
Incline y gire
La cirugía endovascular es un procedimiento especializado mínimamente invasivo que consiste en torcer y guiar con cuidado un cable médico delgado a través de las arterias y los vasos del cuerpo hasta una ubicación objetivo de manera que se evite dañar las paredes de los vasos. El procedimiento generalmente requiere años de entrenamiento para que un cirujano lo domine.
Los sistemas robóticos se exploran como tecnologías de asistencia en la cirugía endovascular. Estos sistemas involucran principalmente motores que hacen avanzar y retraer un cable mientras lo retuercen a través de la vasculatura del cuerpo.
«Pero tener un toque de robot con el mismo nivel de sofisticación [as a surgeon] es difícil”, señala Kim. «Nuestro sistema se basa en un mecanismo fundamentalmente diferente».
El nuevo sistema del equipo se basa en el trabajo de 2019, en el que demostraron la dirección de un cable controlado magnéticamente a través de un modelo de silicona de tamaño real de vasos sanguíneos en el cerebro. Hicieron esto en ese momento usando un imán de mano, del tamaño de una lata de sopa, que manipularon manualmente.
Desde entonces, colocaron el imán en el extremo de un brazo robótico de grado médico, que se puede dirigir con un pequeño botón de joystick en un mouse. Al inclinar el joystick, los investigadores pueden inclinar el imán en una orientación que pueda seguir un cable magnético. Los botones del mouse controlan un conjunto de accionamientos lineales motorizados, que hacen avanzar y retraer el cable para moverlo hacia adelante y hacia atrás.
El cable es tan delgado y flexible como una guía neurovascular convencional, con una punta suave y magnéticamente sensible que sigue y se dobla en la dirección de un campo magnético.
encontrar una manera
El equipo probó el sistema robótico en el laboratorio de catéteres del MGH, un quirófano con equipo estándar de imágenes médicas utilizado en procedimientos endovasculares. Los investigadores instalaron el brazo robótico en el laboratorio, junto con un modelo de vasos sanguíneos de silicona de tamaño real. Instalan el joystick, junto con un monitor que muestra video en vivo del modelo, en una sala de control. Desde allí, un operador vio el video mientras usaba el joystick para dirigir de forma remota el cable a través de los recipientes.
El equipo entrenó a un grupo de neurocirujanos para usar el sistema robótico. Después de solo una hora de capacitación, cada cirujano pudo operar con éxito el sistema para guiar el cable a través de vasos complejos que son difíciles de navegar con un cable guía manual.
El equipo también usó el sistema robótico para eliminar coágulos simulados de áreas difíciles de alcanzar del modelo. Dirigieron el cable guía a través de los vasos y alrededor de curvas y curvas cerradas, para llegar a las regiones donde los investigadores simularon coágulos. Una vez que guiaron el cable hasta el coágulo, los cirujanos procedieron con métodos endovasculares estándar para pasar un microcatéter a lo largo del cable hasta el sitio del coágulo. Retiraron el alambre, dejando el catéter, que luego aplicaron para eliminar con éxito el coágulo.
«El objetivo principal de la guía magnética es llegar a la ubicación objetivo de forma rápida y segura, de modo que se puedan usar dispositivos estándar como microcatéteres para administrar tratamientos», explica Kim. «Nuestro sistema es como un explorador».
Él espera que el sistema teleoperado pueda ayudar a que más pacientes reciban tratamiento urgente. También ve beneficios para los cirujanos, que normalmente realizan este tipo de procedimientos vasculares en la misma habitación que el paciente, mientras están expuestos a la radiación de las imágenes de rayos X.
«Los neurocirujanos pueden operar el robot en otra habitación o incluso en otra ciudad sin una exposición repetida a los rayos X», dice Zhao. «Estamos realmente entusiasmados con el impacto potencial de esta tecnología en la salud mundial, dado que el accidente cerebrovascular es una de las principales causas de muerte y discapacidad a largo plazo».
Esta investigación fue financiada en parte por la Fundación Nacional de Ciencias, los Institutos Nacionales de Salud y Phillips Research of North America.

